[google-translator]
Wichtiger Hinweis: Es gibt mittlerweile eine neue Softwareversion: Homduino 4.0
In einem anderen Artikel auf dieser Website wird beschrieben, wie man den Homeduino als universelles Sensormodul für die Homematic verwenden kann. Zur Kommmunikation wird dort entweder das Ethernet-LAN verwendet oder WLAN über einen separaten Repeater. https://www.stall.biz/?project=der-homeduino-2-0-als-vielseitiges-lanwlan-sensormodul-fur-die-homematic
Mittlerweile gibt es aber schon relativ preiswerte WLAN oder Wifi-Shields und sog. Breakout-Module auf Basis des Funkmoduls CC3000 von Texas Instruments. Dieses Modul hat den Vorteil, daß zur Kommunikation fast die gleichen Pins und ähnliche Libraries wie bei dem verbreiteten Ethernet-Shield W5100 verwendet werden. Die Anpassung der Homeduino-Software ist deshalb sehr einfach.
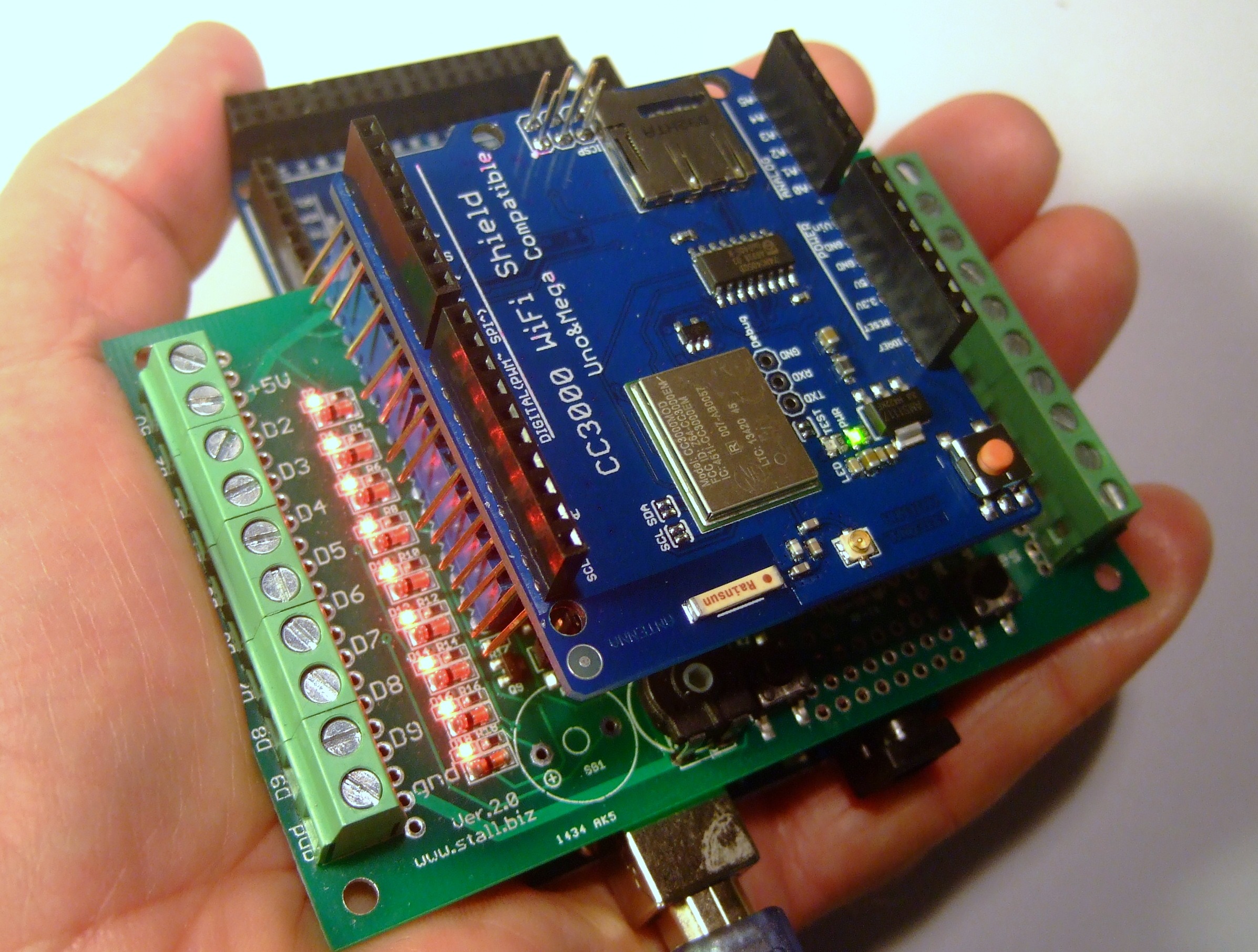
Das Sensormodul mit Wifi-Shield CC3000
Anbieter für entsprechende Module und Shields mit dem CC300 sind Adafruit https://learn.adafruit.com/search?q=cc3000 und Sparkfun https://www.sparkfun.com/products/12071 . Jeder bietet auch eine Library an, die aber nicht direkt austauschbar ist, weil die Pinbelegung unterschiedlich ist.
Adafruit verwendet: Pin D3, Pin D5 und Pin D10, D11, D12, D13
Sparkfun verwendet: Pin D2, Pin D7 und Pin D10, D11, D12, D13
Dies muß man wissen, wenn CC3000-Shields oder Breakouts des einen oder anderen Herstellers eingesetzt werden. Die Libraries lassen sich von beiden genannten Herstellern verwenden, wenn man die Pinbelegung in den Beispielsketchen entsprechend korrigiert.
Ich selbst verwende das nachfolgend verwendete Noname -Wifi-Shield, welches man in China schon für etwa 20€ kaufen kann.
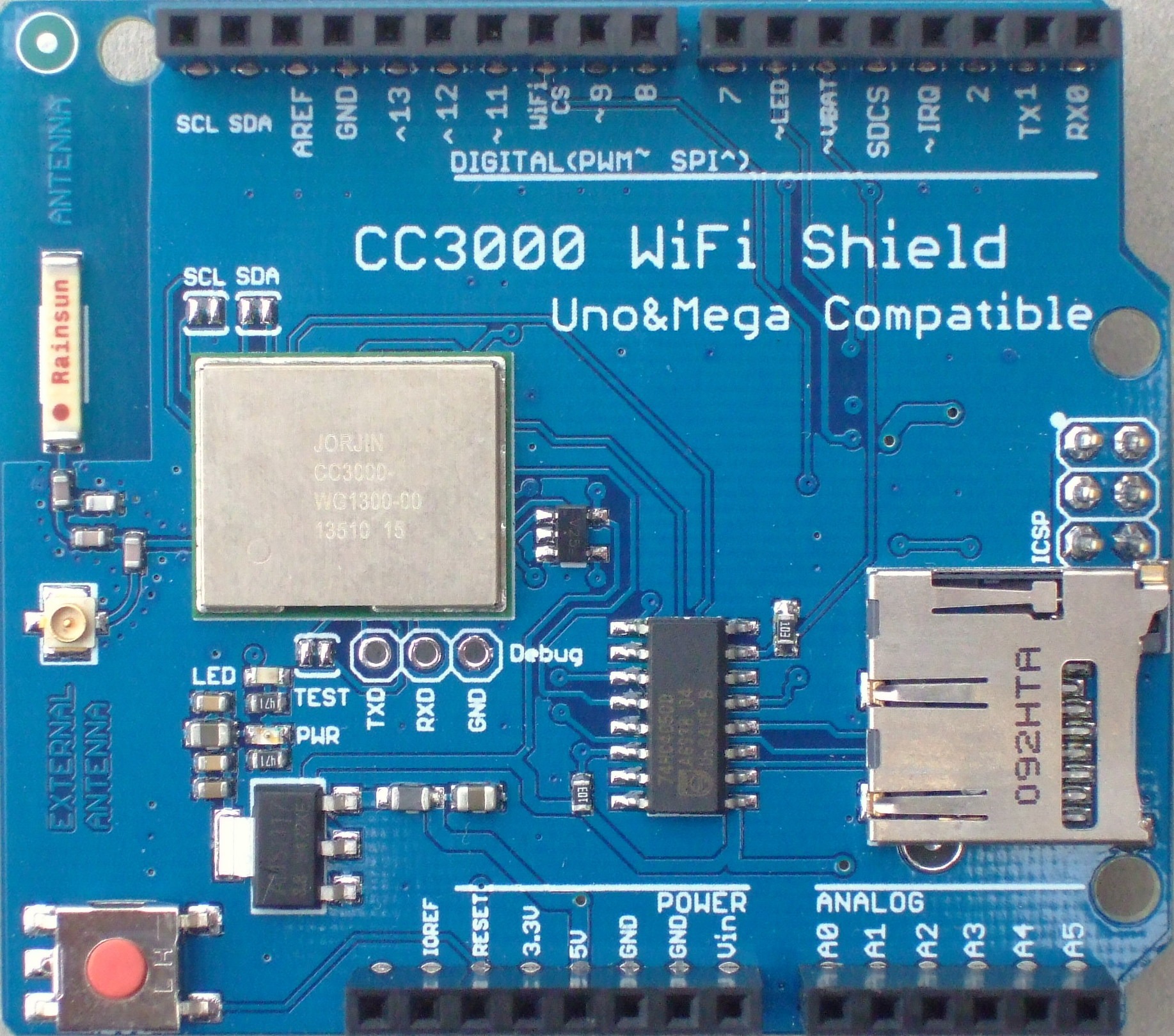
Dieses Shield verwendet die Adafruit Pinbelegung mit D3, D5 und D10 !
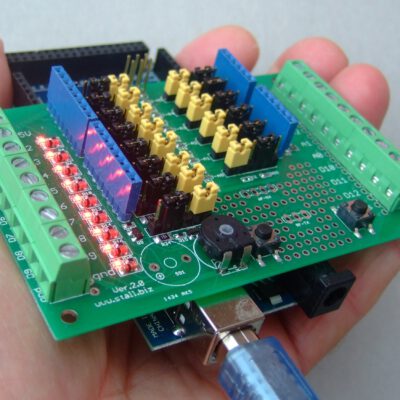
Darüberhinaus sind für den auf dem Shield integrierten SD-Kartenslot noch weitere Pins belegt, die wir aber für das Homeduino Sensormodul nicht benötigen. Deshalb sollten auf der „digitalen“ Seite des Shield-Pinouts nur die notwendigen Adafruit-Pins eingesteckt und die anderen Pins nach außen gebogen werden. Siehe dazu das nachfolgende Bild:
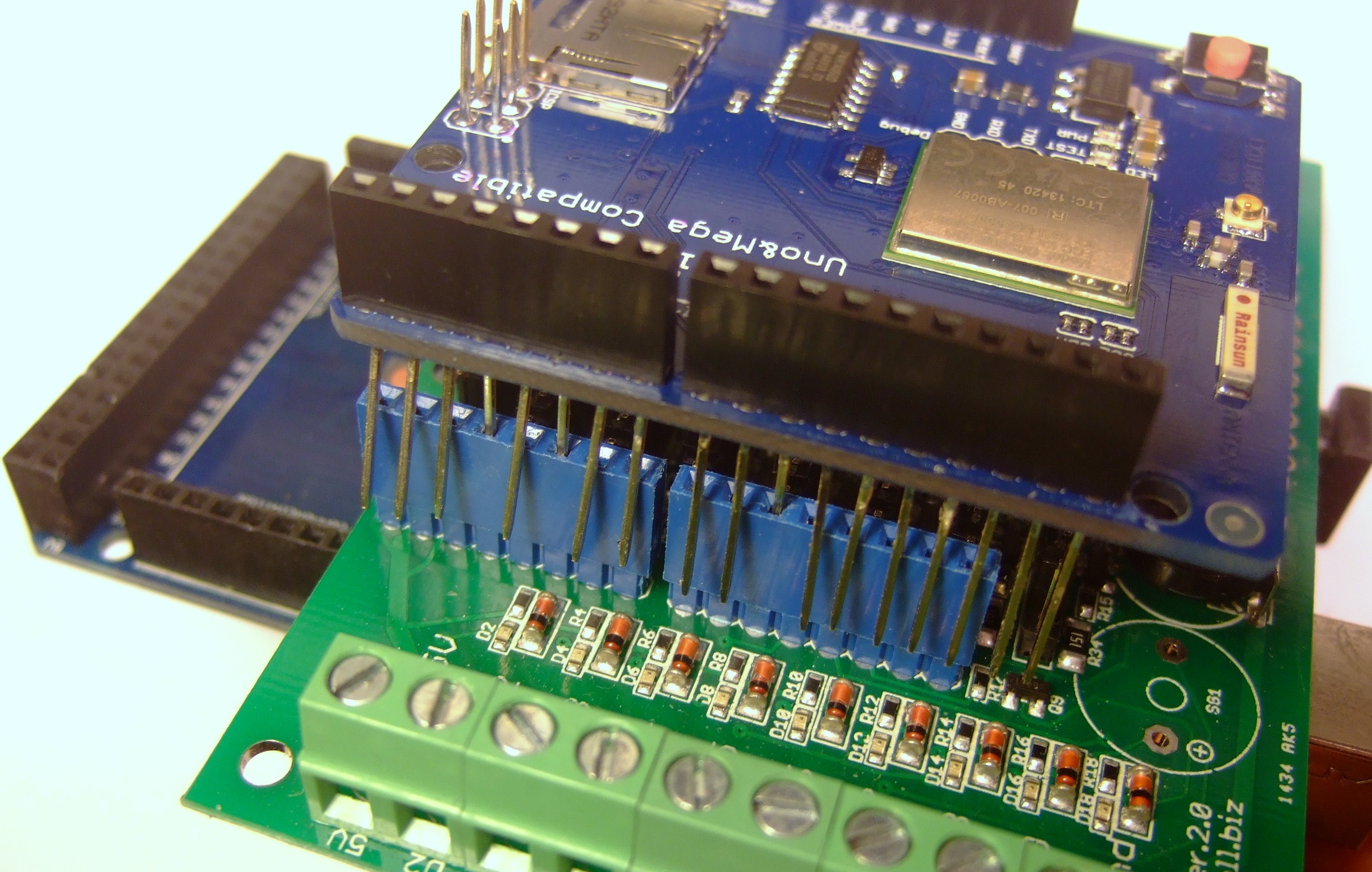
Das Wifi-Shield wird nun anstelle des vorher verwendeten Ethernet W5100-Moduls ganz oben aufgesteckt, so wie es das nachfolgende Bild zeigt. Wegen der für das Wifi-Shield zusätzlich verwendeten Steuerleitungen D2 und D7 können natürlich diese Pins nicht mehr für Homeduino-Sensorsignale verwendet werden. In der zugehörigen Homeduino-Software sind diese Ports deshalb gesperrt.
Die Homeduino-Software
Als erstes muß das Library-Verzeichnis der Arduino-Entwicklungsumgebung mit den entsprechenden CC3000 libraries ergänzt werden. Hier das Vorgehen:
– folgendes Datenpaket holen, entpacken und das Verzeichnis “SFE_CC3000_Library-master” umbenennen und als Unterverzeichnis “SFE_CC3000_Library” im Verzeichnis “libraries” wegspeichern: http://github.com/sparkfun/SFE_CC3000_Library/archive/master.zip
– folgendes Datenpaket holen, entpacken und das Verzeichnis “Adafruit_CC3000_Library-master” umbenennen und als Unterverzeichnis “Adafruit_CC3000_Library” im Verzeichnis “libraries” wegspeichern: https://github.com/adafruit/Adafruit_CC3000_Library/archive/master.zip
Die Homeduino-Software mußte für das neue Wifi-Shield nur geringfügig angepasst werden. Da hier eine WPA-Verschlüsselung verwendet wir, ist die SSID des eigenen WLAN-Netzwerks in den Sketch einzutragen und auch das WLAN-Kennwort. Das ist schon alles!
[codesyntax lang=“text“ title=“Homeduino Sensormodul mit Wifi cc3000″]
//Ver.: "homeduino_small_cc3000_07.ino / Stand: 2015.04.06 / Verfasser: Eugen Stall
//hier ist immer die aktuelle Version:
//https://www.stall.biz/?project=der-homeduino-2-0-mit-cc3000-wifi-shield-als-sensormodul-fuer-die-homematic
//fuer Arduino Mega 2560, UNO, Duemilanove mit Arduino 1.5.8
//diese Software steuert referenziert die signale an den Arduino-pins mit entsprechenden systemvariablen in der Homematic ccu
//mit dem Befehl: http://<ip der ccu>:8181/GET /xy.exe?antwort=dom.GetObject('<systemvariable>').State(" + value + ")"
//Quellen:Arduino website plus http://arduino.cc/en/Tutorial/WebClient und ...
// http://tushev.org/articles/arduino/item/52-how-it-works-ds18b20-and-arduino und ...
#include <SPI.h>
#include <Wire.h> // Comes with Arduino IDE
#include <OneWire.h> //für Temperatursensoren DS18B20 http://www.hacktronics.com/code/OneWire.zip
#include <NewPing.h> //für Ultraschallsensoren SR04 https://arduino-new-ping.googlecode.com/files/NewPing_v1.5.zip
#include "DHT.h" //für Temperatursensoren SHT22 https://github.com/adafruit/DHT-sensor-library/archive/master.zip
#include <AS_BH1750.h> //für I2C-Luxmeter https://github.com/hexenmeister/AS_BH1750/archive/master.zip
#include <SFE_BMP180.h>//für I2C-Barometer https://github.com/sparkfun/BMP180_Breakout/archive/master.zip
#include <SFE_CC3000.h>// fuer cc3000 wifi http://github.com/sparkfun/SFE_CC3000_Library/archive/master.zip
#include <SFE_CC3000_Client.h>
byte ccu[] = { 192, 168, 178, 50 }; //das ist die IP der CCU <<user-eingabe<<
byte mac[] = { 0xCC, 0xCC, 0xCC, 0xCC, 0xCC, 0xCC }; //muss nur bei mehreren homeduinos geändert werden ! <<user-eingabe<<
byte homeduino[] = { 192, 168, 178, 52 }; //das ist die feste IP des Homeduino, wenn DHCP versagt <<user-eingabe<<
const byte board = 54; //"14" = UNO/Duemilanove; "54" = MEGA2560 <<user-eingabe<<
String homeduino_nummer = "x"; // indiv. Bezeichnung für diese homeduino-box <<user-eingabe<<
String hm_systemvariable = "homeduino_" + homeduino_nummer +"_";
//Input-Kennung: hier wird die Funktion der Eingänge D0 bis D9 festgelegt
byte iomodus_D[10] = {0, 0,
1, //D2 :"0" = digital_in; "1" = 1wire; "3" = SHTxx; "4" = Ultraschall; "2" = Infrarot; <<user-eingabe<<
9, //D3 :"9" = belegt wifi-shield;
1, //D4 :"0" = digital_in; "1" = 1wire; "3" = SHTxx; "4" = Ultraschall; <<user-eingabe<<
9, //D5 :"9" = belegt wifi-shield;
1, //D6 :"0" = digital_in; "1" = 1wire; "3" = SHTxx; "4" = Ultraschall; <<user-eingabe<<
1, //D7 :"0" = digital_in; "1" = 1wire; "3" = SHTxx; "4" = Ultraschall; <<user-eingabe<<
1, //D8 :"0" = digital_in; "1" = 1wire; "3" = SHTxx; "4" = Ultraschall; <<user-eingabe<<
1 //D9 :"0" = digital_in; "1" = 1wire; "3" = SHTxx; "4" = Ultraschall; <<user-eingabe<<
};
//hier wird die Funktion der Eingänge A0 bis A5 festgelegt
byte iomodus_A[6] = {1, //A0 :"0" = digital_in; "10" = analogin; "11" = NTC; "1" = 1wire; <<user-eingabe<<
1, //A1 :"0" = digital_in; "10" = analogin; "11" = NTC; "1" = 1wire; <<user-eingabe<<
1, //A2 :"0" = digital_in; "10" = analogin; "11" = NTC; "1" = 1wire; <<user-eingabe<<
1, //A3 :"0" = digital_in; "10" = analogin; "11" = NTC; "1" = 1wire; <<user-eingabe<<
1, //A4 :"0" = digital_in; "10" = analogin; "11" = NTC; "1" = 1wire; <<user-eingabe<<
1 //A5 :"0" = digital_in; "10" = analogin; "11" = NTC; "1" = 1wire; <<user-eingabe<<
};
//hier werden Sensoren am I2C-Eingang aktiviert
byte iomodus_baro = 1; //"0" = N.C.; "1" = BMP180 <<user-eingabe<<
byte iomodus_lux = 1; //"0" = N.C.; "1" = BH1750; <<user-eingabe<<
//hier werden die zuletzt gesendeten sytemvariablen gespeichert
boolean last_digitalin_value_D[10];
float last_digital_value_D[10];
boolean last_digitalin_value_A[6];
float last_analogin_value_A[6];
float last_IR_value;
float last_RF_value;
float last_lux_value;
double last_baro_value;
double last_baroT_value;
boolean complete_loop =1; // wenn 1, dann einmal komplett durchlaufen
boolean value;
String befehl;
String I;
int analogwert;
float tempNTC;
float B_wert = 3950; //aus dem Datenblatt des NTC //<<user-eingabe<<
float Tn = 298.15; //25°Celsius in °Kelvin
float Rv = 10000; //Vorwiderstand
float Rn = 10000; //NTC-Widerstand bei 25°C
float Rt ;
float temp_tur;
float humidity;
float delta_onewire = 0.2; //Deltas für Sendeauslösung
float delta_sht = 0.2;
float delta_us = 2;
float delta_analog = 2;
float delta_ntc = 0.2;
float delta_lux = 20;
double delta_baro = 0.2;
double delta_baroT = 0.5;
long duration, cm; //variable für Ultraschallsensor
unsigned long next_full_loop = 0;
unsigned long delta_time = 3600000; // jede Stunde werden alle Inputs aktualisiert
unsigned long delta_tx = 500; //in ms, minimaler Abstand der Telegramme an die CCU
unsigned long next_tx = 0;
//**************************************************************************************************
//EthernetClient client; // Initialize the Ethernet client library
AS_BH1750 sensor; //Initialize BH1750 Luxmeter library
#define ALTITUDE 299.0 // seehoehe in metern
SFE_BMP180 pressure;
char status;
double T,P,p0;
// Pins
#define CC3000_INT 3 // Needs to be an interrupt pin (D2/D3)
#define CC3000_EN 5 // Can be any digital pin
#define CC3000_CS 10 // Preferred is pin 10 on Uno
// Connection info data lengths
#define IP_ADDR_LEN 4 // Length of IP address in bytes
// Constants
char ap_ssid[] = "ssid"; // SSID of network <<user-eingabe<<
char ap_password[] = "password"; // Password of network <<user-eingabe<<
unsigned int ap_security = WLAN_SEC_WPA2; // Security of network
unsigned int timeout = 30000; // Milliseconds
//char server[] = "192,168,178,50"; // Remote host site
// Global Variables
SFE_CC3000 wifi = SFE_CC3000(CC3000_INT, CC3000_EN, CC3000_CS);
SFE_CC3000_Client client = SFE_CC3000_Client(wifi);
//**************************************************************************************************
void setup()
{
ConnectionInfo connection_info;
int i;
// Initialize Serial port
Serial.begin(115200); Serial.println("SparkFun CC3000 - WebClient");
// Initialize CC3000 (configure SPI communications)
if ( wifi.init() ) {Serial.println("init complete");}
else {Serial.println("problem with init!");}
// Connect using DHCP
if(!wifi.connect(ap_ssid, ap_security, ap_password, timeout)) {Serial.println("no connection to AP");}
// Gather connection details and print IP address
if ( !wifi.getConnectionInfo(connection_info) ) {Serial.println("no connection details");}
else {for (i = 0; i < IP_ADDR_LEN; i++)
{Serial.print(connection_info.ip_address[i]);
if ( i < IP_ADDR_LEN - 1 ) {Serial.print(".");}
}
}
// Make a TCP connection to remote host
if (client.connect(ccu, 8181)) {}
else {Serial.println("connection failed");} // if you didn't get a connection to the server:
client.stop();
char myIpString[24]; //IP auslesen
//IPAddress myIp = Ethernet.localIP();
//sprintf(myIpString, "%d.%d.%d.%d", myIp[0], myIp[1], myIp[2], myIp[3]);
I = myIpString;
befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "IP" + "').State('" + I + "')";
set_sysvar();
}
//**************************************************************************************************
void loop()
{if (millis() > next_full_loop) //mindestens jede Stunde eine komplette Aktualisierung
{complete_loop = 1; next_full_loop = millis() + delta_time;
if (next_full_loop < millis()) {complete_loop = 0;} //wichtig wegen Zahlensprung von millis() alle 50 Tage
}
//**************************************************************************************************
for (int i = 2; i < 10; i++) //behandlung digitaleingänge D2 bis D9
{if (iomodus_D[i] == 0)
{pinMode(i, INPUT);
value =digitalRead(i);
if ((!value == last_digitalin_value_D[i]) || complete_loop)
{I = String(i);
befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "D" + I + "').State(" + value + ")";
set_sysvar();
last_digitalin_value_D[i] = value;
}
}
}
//**************************************************************************************************
for (int i = 2; i < 10; i++) //behandlung onewire D2 bis D9
{if (iomodus_D[i] == 1)
{OneWire ds(i);
#define DS18S20_ID 0x10
#define DS18B20_ID 0x28
byte present = 0;
byte data[12];
byte addr[8];
temp_tur = 1000.0;
if (!ds.search(addr)) { ds.reset_search(); temp_tur = -1000.0; } //find a device
if ((OneWire::crc8( addr, 7) != addr[7]) && (temp_tur > -1000.0)) {temp_tur = -1000.0; }
if ((addr[0] != DS18S20_ID && addr[0] != DS18B20_ID)&& (temp_tur > -1000.0)) {temp_tur = -1000.0;}
if (temp_tur > -1000.0)
{ds.reset();
ds.select(addr);
ds.write(0x44, 1); // Start conversion
delay(850); // Wait some time...
present = ds.reset();
ds.select(addr);
ds.write(0xBE); // Issue Read scratchpad command
for ( int k = 0; k < 9; k++) { data[k] = ds.read(); } // Receive 9 bytes
temp_tur = ( (data[1] << 8) + data[0] )*0.0625; // Calculate temperature value 18B20
//temp_tur = ( (data[1] << 8) + data[0] )*0.5 // Calculate temperature value 18S20
}
if ((temp_tur > (last_digital_value_D[i] + delta_onewire)) || (temp_tur < (last_digital_value_D[i] - delta_onewire)) || complete_loop)
{
I = String(i);
befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "D" + I + "').State(" + temp_tur + ")";
set_sysvar();
last_digital_value_D[i] = temp_tur;
}
}
}
//**************************************************************************************************
for (int i = 0; i < 6; i++) //behandlung onewire A0 bis A5
{if (iomodus_A[i] == 1)
{OneWire ds(i+54);
#define DS18S20_ID 0x10
#define DS18B20_ID 0x28
byte present = 0;
byte data[12];
byte addr[8];
temp_tur = 1000.0;
if (!ds.search(addr)) { ds.reset_search(); temp_tur = -1000.0; } //find a device
if ((OneWire::crc8( addr, 7) != addr[7]) && (temp_tur > -1000.0)) {temp_tur = -1000.0; }
if ((addr[0] != DS18S20_ID && addr[0] != DS18B20_ID)&& (temp_tur > -1000.0)) {temp_tur = -1000.0;}
if (temp_tur > -1000.0)
{ds.reset();
ds.select(addr);
ds.write(0x44, 1); // Start conversion
delay(850); // Wait some time...
present = ds.reset();
ds.select(addr);
ds.write(0xBE); // Issue Read scratchpad command
for ( int k = 0; k < 9; k++) { data[k] = ds.read(); } // Receive 9 bytes
temp_tur = ( (data[1] << 8) + data[0] )*0.0625; // Calculate temperature value 18B20
//temp_tur = ( (data[1] << 8) + data[0] )*0.5 // Calculate temperature value 18S20
}
if ((temp_tur > (last_analogin_value_A[i] + delta_onewire)) || (temp_tur < (last_analogin_value_A[i] - delta_onewire)) || complete_loop)
{
I = String(i);
befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "A" + I + "').State(" + temp_tur + ")";
set_sysvar();
last_analogin_value_A[i] = temp_tur;
}
}
}
//************************************************************************************************** for (int i = 2; i < 10; i++) //behandlung onewire D2 bis D9
for (int i = 2; i < 10; i++) //behandlung DHT22 D2 bis D9
{if (iomodus_D[i] == 3)
{DHT dht(i, DHT22); //je nach verwendetem sensor "DHT11" oder "DHT22" (AM2302) oder "DHT 21" (AM2301)
dht.begin();
delay(2000); // Sensor readings may also be up to 2 seconds 'old' (its a very slow sensor)
humidity = dht.readHumidity(); // Read temperature as Celsius
temp_tur = dht.readTemperature();
if (isnan(humidity) || isnan(temp_tur) ) // Check if any reads failed and
{Serial.println("Failed to read from DHT sensor!"); temp_tur = -1000;}
if ((temp_tur > (last_digital_value_D[i] + delta_sht)) || (temp_tur < (last_digital_value_D[i] - delta_sht)) || complete_loop)
{
I = String(i);
befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "D" + I + "').State(" + temp_tur + ")";
set_sysvar();
befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "D" + I + "1').State(" + humidity + ")";
set_sysvar();
last_digital_value_D[i] = temp_tur;
}
}
}
//**************************************************************************************************
for (int i = 2; i < 10; i++) //behandlung Ultraschallsensor D2 bis D9
{if (iomodus_D[i] == 4)
{ NewPing sonar(i, i, 200); // NewPing setup of pin and maximum distance.
unsigned int uS = sonar.ping(); // Send ping, get ping time in microseconds (uS).
int cm = uS / US_ROUNDTRIP_CM;
if ((cm > (last_digital_value_D[i] + delta_us)) || (cm < (last_digital_value_D[i] - delta_us)) || complete_loop)
{ I = String(i);
befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "D" + I + "').State(" + cm + ")";
set_sysvar();
last_digital_value_D[i] = cm;
}
}
}
//**************************************************************************************************
for (int i = 0; i < 6; i++) //behandlung digitaleingänge A0 bis A5
{if (iomodus_A[i] == 0)
{pinMode(i +board, INPUT);
value =digitalRead(i+board); //achtung beim uno sind 14 zu addieren, beim mega 54
if ((!value == last_digitalin_value_A[i]) || complete_loop)
{I = String(i);
befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "A" + I + "').State(" + value + ")";
set_sysvar();
last_digitalin_value_A[i] = value;
}
}
}
//**************************************************************************************************
for (int i = 0; i < 6; i++) //behandlung analogeingänge A0 bis A5
{if (iomodus_A[i] == 10)
{analogwert =analogRead(i);
if ((analogwert > (last_analogin_value_A[i] + delta_analog)) || (analogwert < (last_analogin_value_A[i] - delta_analog)) || complete_loop)
{I = String(i);
befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "A" + I + "').State(" + analogwert + ")";
set_sysvar();
last_analogin_value_A[i] = analogwert;
}
}
}
//**************************************************************************************************
for (int i = 0; i < 6; i++) //behandlung NTC an A0 bis A5
{if (iomodus_A[i] == 11)
{Rt = Rv/((1024.0/analogRead(i))- 1.0);
tempNTC = (B_wert * Tn / ( B_wert + (Tn * log(Rt/Rn)))) -Tn +25.0 ;
if ((tempNTC > (last_analogin_value_A[i] + delta_ntc)) || (tempNTC < (last_analogin_value_A[i] - delta_ntc)) || complete_loop)
{I = String(i);
befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "A" + I + "').State(" + tempNTC + ")";
set_sysvar();
last_analogin_value_A[i] = tempNTC;
}
}
}
//**************************************************************************************************
//behandlung Luxmeter BH1750 an SCL pin21 und SDA pin 20
// for normal sensor resolution (1 lx resolution, 0-65535 lx, 120ms, no PowerDown) use: sensor.begin(RESOLUTION_NORMAL, false);
if (iomodus_lux == 1)
{if(!sensor.begin()) { /*Serial.println("Sensor not present");*/}
float lux = sensor.readLightLevel(); delay(1000);
if ((lux > (last_lux_value + delta_lux)) || (lux < (last_lux_value - delta_lux)) || complete_loop)
{befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "lux" + "').State(" + lux + ")";
set_sysvar();
last_lux_value = lux;
}
}
//**************************************************************************************************
//behandlung barometer BMP180 an SCL pin21 und SDA pin 20
if (iomodus_baro == 1)
{if (pressure.begin()) {status = pressure.startTemperature();}
if (status) {delay(status); status = pressure.getTemperature(T);} //messung T
if (status) {status = pressure.startPressure(3);} // //messung P mit resolution 0 bis 3
if (status) {delay(status); status = pressure.getPressure(P,T);}
if (status) {p0 = pressure.sealevel(P,ALTITUDE);} // umrechnung auf N.N.
//Serial.print("Hoehe/m: "); Serial.print(ALTITUDE); Serial.print(" Temperatur/C: "); Serial.print(T); Serial.print(" Normaldruck /mb: "); Serial.println(p0);
if ((p0 > (last_baro_value + delta_baro)) || (p0 < (last_baro_value - delta_baro)) || complete_loop)
{befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "baro" + "').State(" + p0 + ")";
set_sysvar();
last_baro_value = p0;
}
if ((T > (last_baroT_value + delta_baroT)) || (p0 < (last_baroT_value - delta_baroT)) || complete_loop)
{befehl = "GET /xy.exe?antwort=dom.GetObject('" + hm_systemvariable + "baroT" + "').State(" + T + ")";
set_sysvar();
last_baroT_value = T;
}
}
//**************************************************************************************************
complete_loop = 0;
}
//##############################################################
// subroutine HTTP request absetzen:
void set_sysvar()
{ //while (millis() < next_tx) {} //warten bis time > next_tx oder timeout
next_tx = millis() +delta_tx;
if (client.connect(ccu, 8181))
{Serial.println(befehl);
client.println(befehl);
client.println();
client.stop();
}
}
[/codesyntax]
Die genaue Verwendung der Ports und der Anschluss der Sensoren wird im Referenzartikel detailliert beschrieben:
Das I/O-Shield als Bausatz können Sie in meinem Shop kaufen: https://www.stall.biz/?product=io-shield-2-0
Viel Spass beim Funken mit Wifi!
Haftungs- und Sicherheitshinweise
Beim Nachbau müssen natürlich alle wichtigen einschlägigen Sicherheitsvorschriften für den Umgang mit gefährlichen Spannungen eingehalten werden. Fundierte theoretische und praktische Fachkenntnisse der Elektrotechnik und für den Umgang mit gefährlichen Spannungen sind unverzichtbar!!
Durch eine unsachgemäße Installation gefährden Sie ihr Leben und das Leben ihrer Mitmenschen! Darüberhinaus riskieren Sie erhebliche Sachschäden , welche durch Brand etc. hervorgerufen werden können ! Für alle Personen- und Sachschäden durch falsche Installation etc. ist nicht der Hersteller sondern nur der Betreiber verantwortlich.
Ich verweise hier unbedingt auf die „Sicherheitshinweise und Haftungsausschluss„-Seite dieses Blogs.